Team project
Seoul, KoreaProject in Mechatronics & Field Robotics Lab. Sponsored by National Research Foundation of Korea

Why

During Endoscopic Retrograde CholangioPancreatography (ERCP), a flexible tube with a camera (endoscope) is inserted through the mouth into the affected area, and contrast dye is used to highlight these structures on X-rays. This technique is valuable for identifying and addressing conditions like gallstones, strictures, and tumors in the biliary or pancreatic ducts.
Throughout this procedure, doctors are exposed to radiation and, as a precaution, wear lead aprons. However, this protective measure doesn't offer complete safeguarding from the associated risks.
Solution

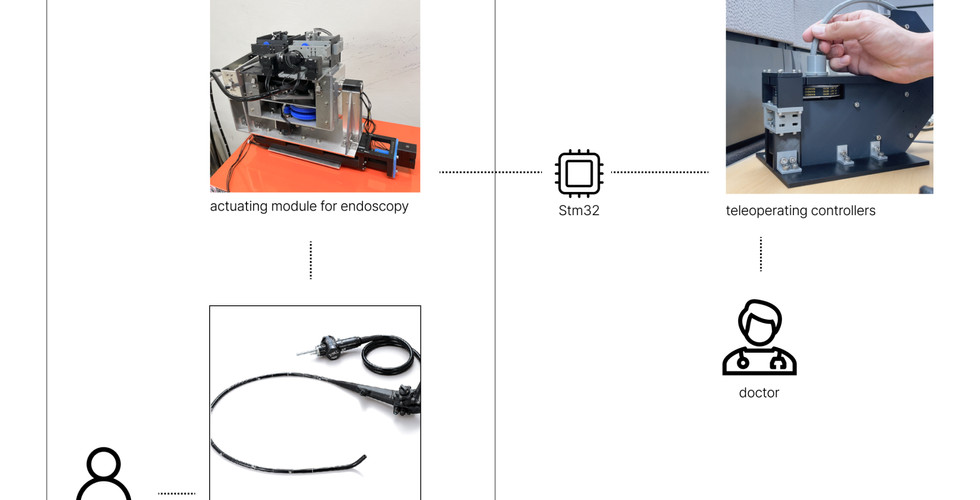




Our team proposes a teleoperation system for ERCP, enabling doctors to control the endoscopy remotely, away from radiation exposure. Once the endoscope is inserted into the surgical site, the doctor places the endoscopy controller into our actuating modules. These modules will then manipulate dials, knobs, and buttons in response to the movements of our teleoperating controllers.
Participation

In this project, I designed an infinite loop controller to navigate catheters and guidewires and developed a guide wire and catheter inserter using the Chebyshev mechanism. Additionally, I devised the primary actuating system's base holder, tailoring it to doctors' surgical procedures, and constructed the control system using STM32 boards and Dynamixel motors.
Comments