Summer Internship @Endo Robotics
Seoul, Korea





RoSE Platform (Robot for Surgical Endoscopic Platform)
The multi-joint forceps of the RoSE platform secure traction by holding, lifting, and pulling the mucous membrane with a robotic arm, thus ensuring a broader view of the area where the surgery is conducted. This improves the safety of dissection and significantly reduces the perforation rate.
Task #1





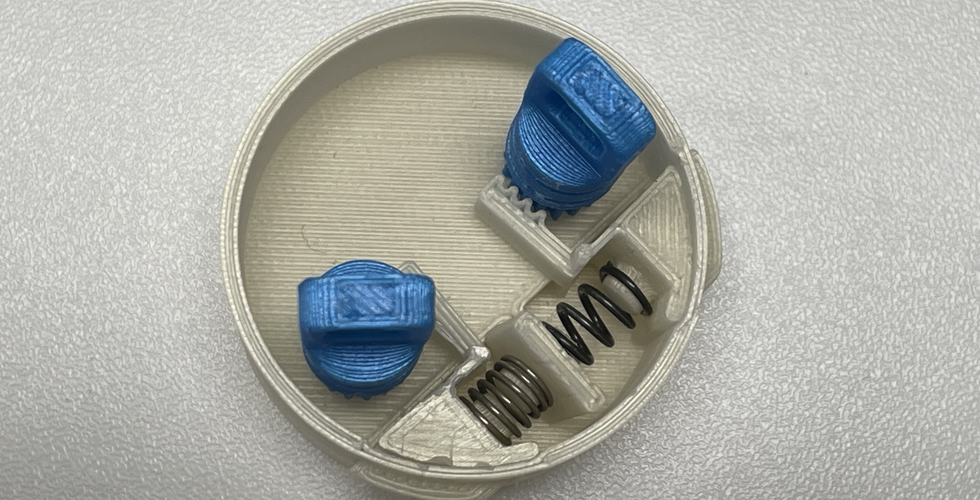





I developed a length adjuster for the tendon-sheath mechanism, where a tendon connects forceps (a minor surgical gripper) to its controller. A unique aspect of this task was removing the electric motor, which had previously responded to controller signals for forceps operation. Instead, my team redesigned the system so that the cable directly transmitted hand movements on the controller to the forceps.

Seven versions of tendon tension adjusters developed throughout the internship period
Task #2










I assisted a pig experiment to test the performance of the RoSE platform, which involved conducting an Endoscopic Submucosal Dissection (ESD) procedure. Observing the entire surgical process provided me with valuable insights into the environment in which doctors perform endoscopy and the practical challenges faced during such surgeries.
Commentaires